Today’s release of Falcon 5.3 delivers new features and improvements shaped by customer engagement and designed to push the possibilities of synthetic data even further. This update introduces powerful capabilities for Synthetic Aperture Radar (SAR), enhances realism in IR simulation, extends versioning across all data types, and expands the robotics simulation pipeline. Whether training AI for defense, autonomy, inspection, or research, Falcon 5.3 brings more control, realism, and efficiency than ever before.
Highlights
- Synthetic Aperture Radar (SAR) virtual sensors (beta release)
Physics-based, GPU-accelerated SAR with a unified workflow in FalconEditor. Mission-specific control over resolution, intensity, noise, and more. - IR Enhancements
Automatic thermal material setup and improved realism in atmosphere imaging for realistic IR output. - Versioning Everywhere – All FalconCloud data types are versioned and instantly retrievable with code via the FalconCloud API.
- URDF Import – Import in URDF-defined robots for any simulation needs. The new workflow enables faster prototyping, research, and deployment.
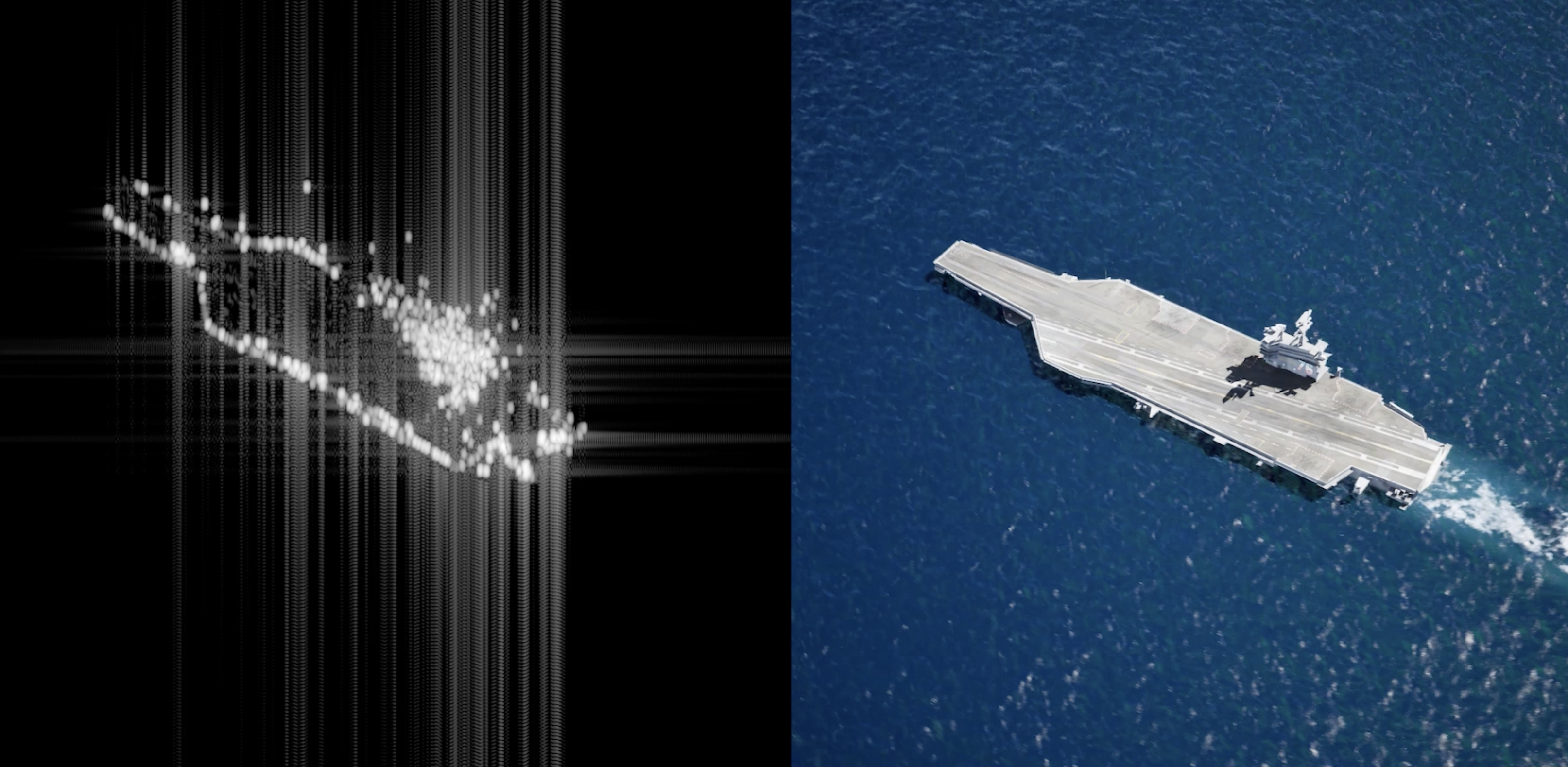
1. Synthetic Aperture Radar (SAR): Mission-Specific Data On Demand — Beta Release
We previewed Falcon's new virtual SAR sensor, and how it is leveraged for building AI-enabled SAR Intelligence, in a recent blog. With Falcon 5.3, this powerful capability is officially in beta release.
Unified, integrated workflow. Build your scenario, place the SAR sensor, generate imagery, post-process, and export—without leaving FalconEditor. The virtual SAR sensor works seamlessly with Falcon’s digital twin catalog and scenario authoring tools, meaning that any possible scenario can be instantly used for synthetic SAR data generation. No custom integration or external workflows required!
Physics-based, GPU-accelerated. Falcon 5.3 leverages a custom fork of Unreal Engine’s raytracer to model high-resolution, multi-bounce radar interactions for generating high-fidelity SAR returns.
Customizable output. Precisely tune core SAR parameters—spatial resolution, signal intensity, noise characteristics, and more—to approximate the behavior of your target real-world system. Generate automatically labeled, mission-specific datasets at scale.
Falcon’s virtual SAR sensor can be applied across dynamic terrestrial and orbital (satellite) scenarios and to simulate sensor fusion in concert with all other Falcon sensors, including cameras, IR/thermal, and more. Combined with automated and pixel-perfect data labeling, it expands options for training and evaluating any AI model under diverse conditions that reflect how modern systems actually operate in the field.
2. IR Enhancements: Automatic Material Setup + More Realistic Atmosphere
Infrared simulation gets a meaningful upgrade in Falcon 5.3. Each material is now automatically assigned a baseline IR value, giving users a realistic starting point for building IR-enabled environments. Instead of starting from scratch, users immediately see plausible thermal output. From there, they can refine materials against real-world data to achieve the correct signatures for any specific scenario.
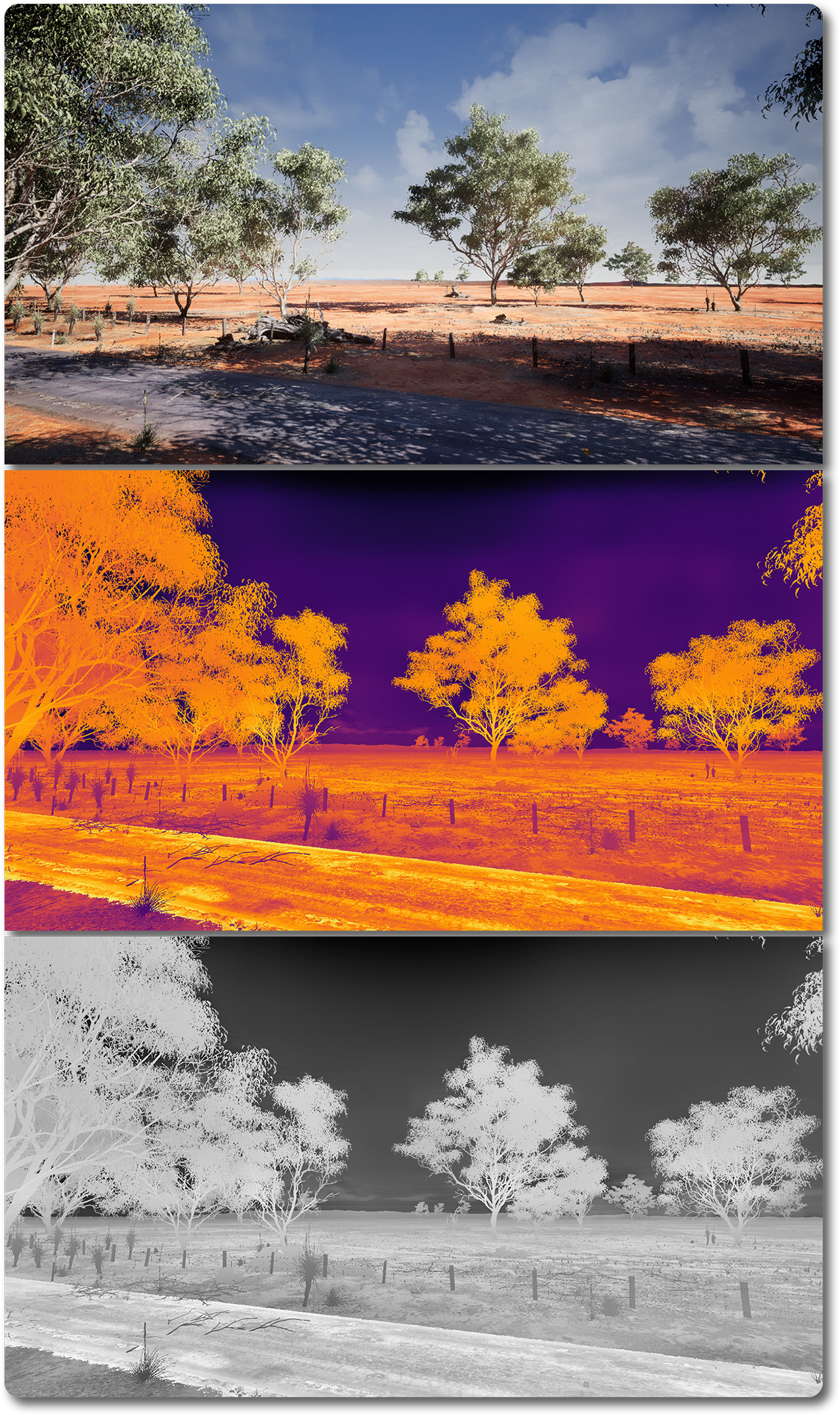
Enabled by the recent Unreal Engine 5.5 update, Falcon 5.3 introduces improved atmospheric lighting built on real-world lux values for sunlight. This ensures that shadows, highlights, and contrast ratios in your environments are consistent with natural illumination, rather than approximated through camera parameters.
This combination of improved atmospheric modeling with automatic material thermal values means that IR scenarios in 5.3 provide both: a faster starting workflow and a more realistic foundation—helping users generate synthetic IR data that is more precisely aligned with the conditions AI models encounter in the field.
3. Versioning Across All Data Types—Now Instantly Accessible in Code
In 5.2 we introduced versioning in FalconCloud; 5.3 extends versioning across all categories and brings it to the API for instant, programmatic access. Now scenarios, twins, scenarios, buckets, and more, are fully versioned and queryable via the FalconCloud API. Browse history, retrieve any prior artifact, and assemble scenarios from all available catalog assets—right from your code.
Why it matters
- Reproducibility for experiments and publications
- Traceability across teams and time
- Rollbacks when a change regresses model performance
- CI/CD for data with consistent references to exact versions
4. URDF Import Pipeline + New Robot Manipulators in the Falcon Catalog

URDF (Unified Robot Description Format) is an XML specification widely used in ROS workflows to define a robot’s physical structure, kinematics, and visuals (see ROS docs). With Falcon 5.3, users get a new workflow for importing robot models defined in URDF directly into simulation. Paired with Falcon’s native ROS/ROS2 integrations, this updated makes it even easier to bring all robots into Falcon’s high-fidelity environments.
To highlight this update, we’ve expanded our catalog with robotic manipulator system twins. These additions bring frequently asked for digital twins into our catalog and provide robotics researchers and developers with immediately available, simulation-ready assets.
The real power of this pipeline is flexibility: the same approach used to create the manipulator digital twins can be applied to ANY robot defined in URDF (bipeds, quadrupeds, wheeled robots, etc.), enabling users to bring their robots into Falcon for perception training, planning validation, or task-level simulation. Whether working on collaborative arms, mobile manipulators, or specialized industrial robots, URDF import opens a fast path from description file to sim-ready system twin.
New manipulator robot system twins include:
- Universal Robots UR5
- ASEA Brown Boveri (ABB) IRB 6640 Foundry Prime Robot
- Unitree Robotics Z1 Robot Arm
5. Catalog Updates: New Digital Twins Available for All Simulations
Our catalog of free-to-use, publicly available digital twins is always expanding. In addition to the new robot arm system twins (above), here is a small sample of recent additions, that include new item and environment twins:
Eagle Ridge, Colorado

New collection of rural item twins

All of these digital twins (and many more) can be downloaded from our digital twin catalog starting today.
Looking for more details on Falcon 5.3? Read the full release notes here.
Got questions for the team? Get in touch.